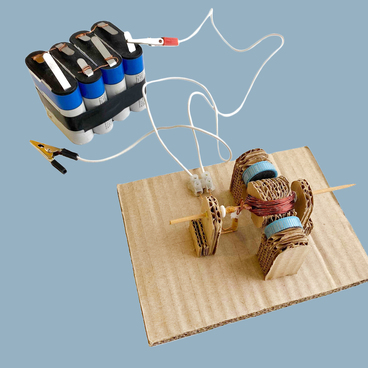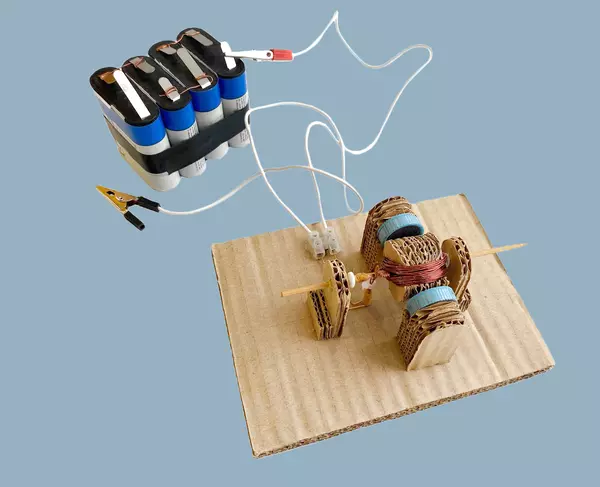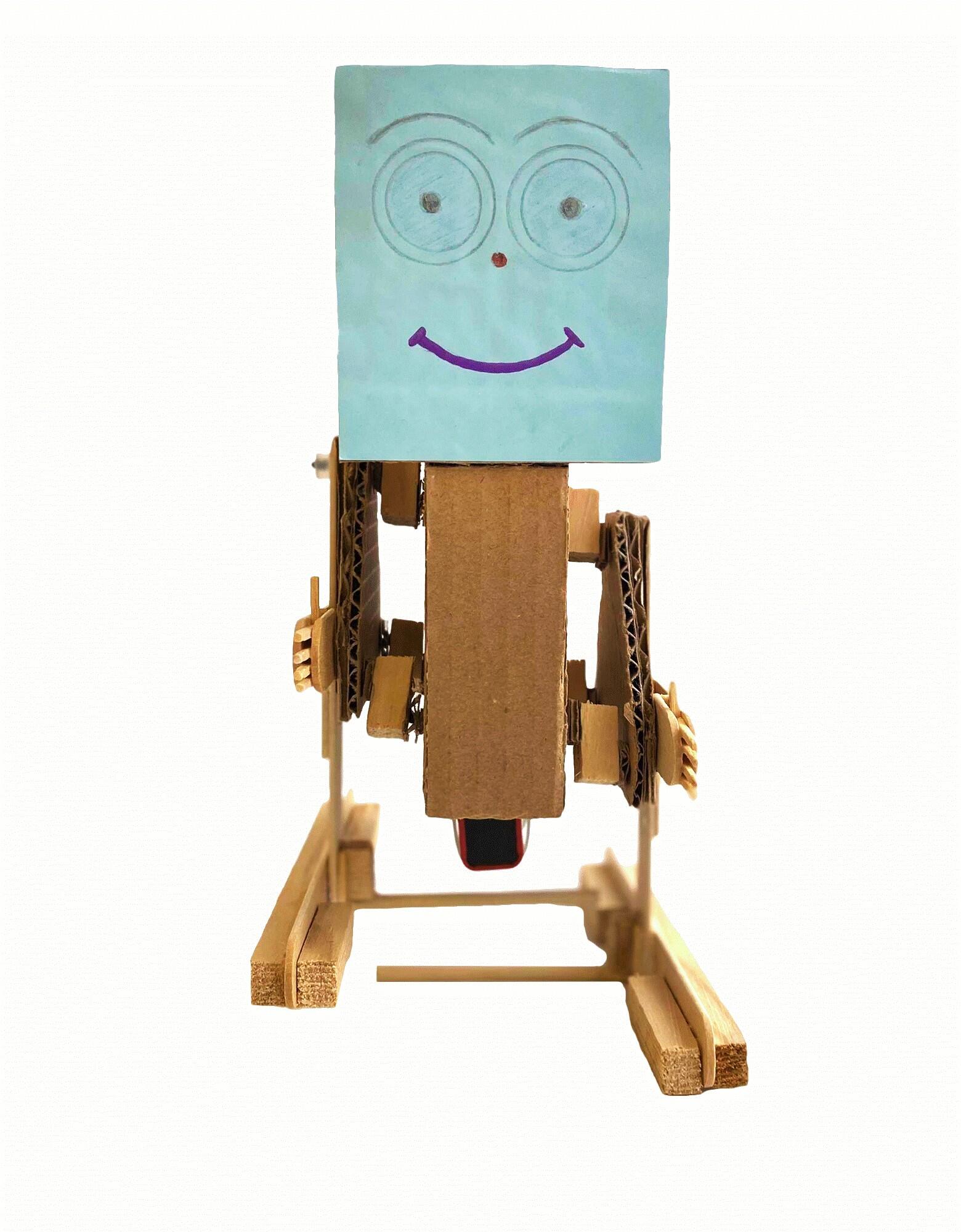
Робот перемещается при помощи быстро вращающихся на осях опорных конструкций (ног). Шатунные механизмы приводятся в движение электродвигателем.
Роботы второго типа ещё называются шагающими механизмами. В них движение как правило одного мотора с помощью кривошипно-шатунного механизма преобразуется в движение ног.
Среди многообразия конструкций и проектов по робототехнике особое место занимают шагающие роботы, передвигающиеся подобно живым организмам на подвижных опорах — «ногах».
Роботы подобного типа выглядят очень интересно и привлекательно, но зачастую любители робототехники не уделяют им должного внимания из-за трудностей при создании и использовании. Такие роботы можно разделить на два типа: первый тип имеет многочисленные сервоприводы и редукторы на каждой конечности, которые управляются с достаточно мощного процессора и обеспечивают в свою очередь свободное перемещение. При всех преимуществах такой системы она очень дорога, требует специального ПО.
Роботы второго типа ещё называются шагающими механизмами. В них движение как правило одного мотора с помощью кривошипно-шатунного механизма преобразуется в движение ног.